VEX Robot - Wall-e Sr. : 2/5/14
Tasks:
1. Figure out how the robot works
2. Fix the existed problems
3. Use reverse engineer to understand the concept of the robot
4. Modify
Functions and components of the original robot:
- Run by a remote controller through the program connection between two connected USB in both the robot and the controller.
- The wheels and arm of the original robot are running by the motors that attached to each system of moments.
- All of the motors, lights, batteries, and USB, are connect to the master component that act as brain of the robot.
- Think blinking lights on the remote control and the robot have their own purpose that relate to the connection of the robot and the controller. They played a role as the identification of the robot's status.
- Run by a remote controller through the program connection between two connected USB in both the robot and the controller.
- The wheels and arm of the original robot are running by the motors that attached to each system of moments.
- All of the motors, lights, batteries, and USB, are connect to the master component that act as brain of the robot.
- Think blinking lights on the remote control and the robot have their own purpose that relate to the connection of the robot and the controller. They played a role as the identification of the robot's status.

Original Robot
Problems and Solutions of the Existed Robot
- At first we couldn't get the robot up on running; therefore, we must identify the problem.
- After looking at the manual and analyzing the robot, we figured that both the robot and the controller need the appropriate charged batteries in order to power them.
- After exchanging the power source, we were able to run the robot.
- Finally, we used reversed engineering to understand how all the parts were connected to each other. After having a good understanding of the mechanic behind this robot, we started to brainstorm about the modify model of the robot.
- At first we couldn't get the robot up on running; therefore, we must identify the problem.
- After looking at the manual and analyzing the robot, we figured that both the robot and the controller need the appropriate charged batteries in order to power them.
- After exchanging the power source, we were able to run the robot.
- Finally, we used reversed engineering to understand how all the parts were connected to each other. After having a good understanding of the mechanic behind this robot, we started to brainstorm about the modify model of the robot.
Research
VEX Curriculum: 6.3 Accumulators
http://curriculum.vexrobotics.com/curriculum/object-manipulation/accumulators
http://curriculum.vexrobotics.com/curriculum/object-manipulation/accumulators
Programming
Modification

Design # 1: Rolling balls track
Purpose: The design was meant for the purpose of transporting balls from one side of the robot to the opposite through the machine's work.
Problems: The desire model requires programming and complex design. We did not had enough time and materials to create this machine. The programming process would be the hardest part, because we have no knowledge about the programming language. Complex research would be needed in order to achieve such machine. The time constraint was the obstacle that we couldn't overcome for this particular design.
Purpose: The design was meant for the purpose of transporting balls from one side of the robot to the opposite through the machine's work.
Problems: The desire model requires programming and complex design. We did not had enough time and materials to create this machine. The programming process would be the hardest part, because we have no knowledge about the programming language. Complex research would be needed in order to achieve such machine. The time constraint was the obstacle that we couldn't overcome for this particular design.
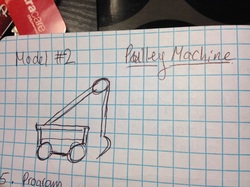
Design # 2: Pulley
Purpose: The use of this design is a pulley machine in construction works. It's a cart combine with the pulley system to carry heavy objects.
Problems: The mechanic make up and the program of this machine is very similar to the original robot, thus it is possible for us to create this machine by deadline. However, the lack of material such as the pulley itself made it hard to complete to project.
Purpose: The use of this design is a pulley machine in construction works. It's a cart combine with the pulley system to carry heavy objects.
Problems: The mechanic make up and the program of this machine is very similar to the original robot, thus it is possible for us to create this machine by deadline. However, the lack of material such as the pulley itself made it hard to complete to project.

Design #3: Tank
Purpose: This is a design of a tank/cart that we ended up with as an automobile that could run through tough landscape.
Problem: Not much complex details or modifications were made, but we were able to run the cart with the remote controller.
Purpose: This is a design of a tank/cart that we ended up with as an automobile that could run through tough landscape.
Problem: Not much complex details or modifications were made, but we were able to run the cart with the remote controller.
|
|
|
